رباتهای ناسا
فناوریهای پیشرفتهی ناسا فقط به صنعت مربوط نمیشود بلکه فضانوردان نیز از این تکنولوژی در فضا نیز استفاده میکنند. با کمک این رباتهای فضایی توانستیم دانش خود را افزایش دهیم و به کاوش در مریخ و دیگر سیارات بپردازیم که درواقع اکتشافات صورتگرفته بدون اینرباتهای فضایی غیرممکن بود.
مریخنوردها،فضاپیماها و مدارگردها که تا بهحال به منظومه شمسی فرستاده شدهاند در واقع مدلهای مختلفی از همینرباتها هستند که در طول زمان پیشرفته و کامل شدهاند.
یکی از ربات های دوست داشتنی ایستگاه فضایی”lnt-Ball” است .

هدف طراحیInt-Ball، ساخت رباتی بود که توانایی تصویربرداری از سطح زمین را بهصورت خودکار و در حال حرکت داشته باشد. Int-Ballمیتواند در جاذبه صفر نیز فعالیت کند، در حقیقت از آن میتوان در هرجایی و هرزمانی استفاده کرد و از هر زاویهای تصویر برداشت. این خاصیت میتواند زمانی را که افراد ساکن در ایستگاه فضایی بینالمللی صرف ثبت تصویرمیکنند، به صفر برساند.
اینربات که توسط آژانس تحقیقاتی هوافضای ژاپن ساخته شده دارای حسگرهای خودکار،چرخش و شتاب بوده و ترمزهای الکترومغناطیسی آن در فضا و جاذبه صفر نیز کار میکند. آژانس تحقیقاتیInt-Ball را برای تایید اولیه و بهبود عملکرد آن به ایستگاه فضایی بینالمللی فرستاده است.
روبونات 2 (Robonaut 2)

کار بر روی اولین روبونات در سال 1997 شروع شد. ایده کار ساخت یکربات فضایی انسان نما، این بود که بتواند به فضانوردان در کارهایی که وجود یک جفت دست دیگرمیتوانست مفید باشد، یا در کارهایی که ممکن بود جان فضانوردان به خطر افتد، یاری رساند. این رباتها به ابزارهای بهخصوصی برای کار احتیاج نداشته و دقیقا از همان ابزارهایی که فضانوردان از آنها بهره میبرند، استفاده میکنند. روبونات در دو مدل که با نام هایR1 و R2 شناخته میشود، انتشار یافت. در سال 2010 میلادی،روبونات 2 یا همان R2، رونمایی شد. R2 قابلیت حرکت با سرعتی حدودا چهار برابر R1 را داراست، نسبت به R1 کوچکتر، ماهرتر و دارای احساس عمیقتر و بیشتری میباشد.
این ربات فضایی میتوانددستانش را با سرعت 2 متر بر ثانیه حرکت دهد و قابلیت حمل بار حدود 18 کیلوگرم را دارد. روبونات 2 از چالاکی باورنکردنی برخوردار است، میتواند دستهای خود را در 12 جهت مختلف حرکت دهد، بازو و مچ دستهایش را در هفت جهت مختلف تاب بدهد که برای انجام این حرکات از 54 موتور مجزا استفاده میکند. هر یک از بازوها از سلولهای لمس کنندهای برخوردارند که میتوانند وزن و فشار را احساس کنند. تا قبل از سال 2014 بدن روبونات 2 تنها از بالا تنه تشکیل شده بود اما بعد از آن سال، 2 عدد پا نیز به نیمتنه اضافه شد.
این روبات کیروبو (Kirobo) نام دارد. کیروبو واژهای ژاپنی حاصل ترکیب «ربات» و «امید» است. اینرباتهفتهی گذشته به همراه ۵ تُن تجهیزات به وسیلهییکراکت از جزیرهای در ژاپن به سمت ایستگاه فضایی ژاپن پیچیدهترین رباتهای دنیا را میسازد ولی فرهنگی در ژاپن حاکم است که به واسطهی آن رباتها شکل و شمایل انسانی و احساسی دارند و به خاطر صورت زیبایشان، انسان از آنها خوشش میآید. این فرهنگ را در کارتونهای مانگا (Manga) میتوانید ببینید. کیروبو هم با الهام از قیافهی شخصیتهای همین کارتونها ساخته شده است و ویژگیهای خاص اینکارتونها مثل چشمهای گرد و بسیار درشت را میتوانید در این ربات مشاهده کنید. این ربات ۳۴ سانتیمتر قد دارد و وزنش حدود ۱ کیلوگرم است.

رباتهای سخنگویی مثل کیروبو تدریجاً به جایی برسند که عصای دست فضانوردان در ایستگاه فضایی باشند. ویمیگوید: وقتی مردم به رباتها در فضا فکر میکنند،رباتهایی در ذهنشان میآید که کارهای فیزیکی انجام میدهند. ولی من فکر میکنم آینده پیش روی رباتهایی است که با انسانها ارتباط برقرار خواهند کرد.
کیروبو،ربات ژاپنی سخنگو، قبل از پرواز به سمت ایستگاه فضایی بینالمللی به خبرنگاران گفت: این کار برای من یک قدم کوچک است ولییک جهش بزرگ برای کل رباتهای دنیا به حساب میآید.
آقای تاکاهاشی میگوید فرستادن چنین رباتی به فضا میتواند فصل جدیدی در تاریخ ارتباطات بشری ایجاد کند. من امیدوارم اینربات بتواند به عنوان یک واسطهی ارتباطی میان انسان و ماشین، انسان و اینترنت و حتی میان خود انسانها عمل کند.
دوتا از رباتهایی که قرار است در آینده ساخته شوند
در سال های اخیر،روبات ها نیز به کمک فضانوردان و کارشناسان فضایی شتافته اند تا بتوانند اطلاعات بیشتری از سایر اجرام را در اختیار آنها قرار دهند. این موضوع در حالی است که مدتی پیش ناسا از زیر دریایی جدیدی برای شناخت دریاچه تیتان خبر داده بود و اکنون نوبت به روبات های متفاوتی رسیده تا بتوانند راهگشای محققان و کارشناسان فضایی باشند زیرا کاوشگرهایی مانند زیر دریایی ها قادر به شناسایی بخش های یخیEuropa در مشتری نیستند. روبات مار ماهی جدید ناسا کاوشگر متفاوتی است که می تواند به بررسی و اکتشاف در نقاطی از سایر اجرام بپردازد که تاکنون کاوشگری به آنجا راه نیافته است.
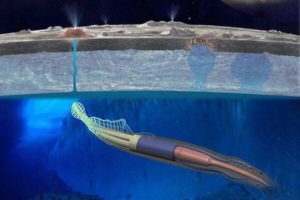
اماروبات ها برای تامین انرژی مورد نیاز خود به برق نیاز دارند در صورتی که نیروی لازم برای شارژ روبات ها در فضا وجود ندارد یا برخی از روبات ها با کمک انرژی خورشیدی شارژ می شوند اما این روبات با استفاده از نیروی مغناطیس متغییر در فضا شارژ می شود تا مانند روبات های خورشیدی به دلیل اتمام شارژ به اغماء نرود.
ناسا در برنامه ای با عنوان مفاهیم پیشرفته خلاقانه (NIAC) به دریافت طرح های خلاقانه در رابطه با ماموریت های اکتشافی پرداخت که در مرحله اول ۱۵ طرح مختلف توانستند بودجه ای در حدود ۱۰۰ هزار دلار را دریافت کنند. اما در این میان طرح روبات مار ماهی توانست به مرحله دوم و دریافت بودجه ۵۰۰ هزار دلاری نائل آید.
ناسا به دنبال استفاده از روبات های بدون سرنشینی است که بتوانند سال ها بدون اتمام شارژ در فضا باقی مانده و به تکمیل ماموریت خود بپردازند همانند فعالیت ماهواره های فضایی. گفتنی است این پروژه تا محقق شدن و وارد فاز عملیاتی شدن هنوز فاصله دارد.
ناسا بر روی نسل جدیدی از روباتها کار می کند که با الهام از توانایی مارمولک در بالارفتن از دیوارها، فعالیت تعمیراتی در بدنه خارجی ایستگاه فضایی بین المللی انجام می دهند.
در چشم انداز جدید آژانس فضانوردی آمریکا (ناسا) طراحی و ساخت روباتهایی در نظرگرفته شده که در آینده ای نه چندان دور از بدنه ایستگاه فضایی بین المللی بالا رفته و کارهای پیچیده مهندسی را انجام می دهند.
در حال حاضر دانشمندان آزمایشگاه پیش رانش جت ناسا در کالیفرنیا بر روی ساخت دستگیره های مخصوصی شبیه پنجه مارمولک کار می کنند که به روباتها امکان بالا رفتن از دیواره عمودی ایستگاه فضایی بین المللی را می دهد.
ناسا در نظر دارد تا با توسعه این فناوری جدید، امکان بهره مندی بیشتر از توانمندی روباتها در مدار زمین را فراهم سازد.
از جمله کاربردهای این فناوری جدید، تعمیر و نگهداری ماهواره ها و بازگرداندن آنها به سرویس دهی است. همچنین جمع آوری زباله های فضایی از دیگر اهداف توسعه روباتهایی با توانایی حرکت نظیر مارمولکهاست.
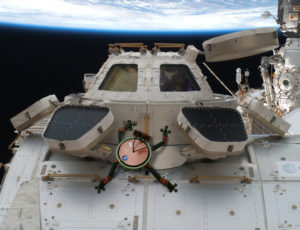
مارمولکها همواره برای بشر جالب توجه بوده اند. حرکت این جانور بر روی سطوح عمودی درحالی صورت می گیرد که پایداری آن همواره مثال زدنی بوده است.
یک سری از ربات های ناسا را نام بردیم و در مورد آنها توضیح دادیم
به نظر شما هدف از ساخت این ربات ها چیست ؟
فاطمه فقیهی